Witam, bazując na gotowych modułach (Arduino UNO, LCD 16x2, 2xSerwo mg995) buduję prototyp mini rotora. Wyświetlacz LCD 2x16 znaków, połączony jest z Arduino modułem LCM1602.
Dwa mini-serwa MG995 zasilane są z Arduino 3.3V, można je też zasilać większym napięciem z zewn. zasilacza.
Te mosiężne zębatki poza dolną wyglądają sensownie, ale powiedz, jak zamierzasz zapobiegać obracaniu tego przez wiatr.
Pozdrawiam Jurek SP1JPQ & SO1D _________________ Nawet jeżeli się to komuś nie podoba to w moich postach jest napisane tylko to co jest napisane, a nie to co się komuś wydaje, że jest napisane.
Serwo przy nacisku kilku kg zmienia pozycję, to prawda, oprogramowanie musi odczytywać bieżącą pozycję funkcją: int cur_az = servo_az.read();
takie ciągłe (np. co 0.25 sek) monitorowanie pozycji anteny (obracanej przez wiatr) pozwala w programie obliczyć korektę i po przekroczeniu pewnej wartości odchylenia wysyła się do silnika korektę pozycji: servo_az.write(cur_az + offset); kod do pobrania tutaj.
Przy silniejszym wietrze zasilanie silników powinno mieć lepsze parametry, np: Vcc = 7V, Imax = 1A (na jedno serwo). To jednak mini-rotor i czasem może nie dać rady. Można cały czas podawać zasilanie na serwa, tak jak pisze Andrzej, wtedy mocno trzymają pozycję, obecnie po ustawieniu pozycji wyłączam napięcie. Sprawdzę to w czasie testów na balkonie. _________________ 73! Tom
to bardzo fajny pomysł, a moje pytanie miało na celu zwrócenie uwagi, że sama waga anteny nie jest tu najistotniejsza, ale powierzchnia oporu na wiatr. Zastanawiałem się nad możliwością wykorzystania do BDP na 10 lub 15 m w terenie i obawiam się, że pomimo wagi ok 0,5 kg przy rozpiętości anteny 5 - 7,5 metra te serwa mogą nie wyrobić. Oczywiście mówię o normalnych warunkach, a nie o tym co wieje dzisiaj.
Jakiś czas temu zrobiłem próbę na rotorze od kamery CCIR. Niestety skończyło się tragicznie dla rotora obciążonego zaledwie 7 el DK7ZB.
Pozdrawiam Jurek SP1JPQ & SO1D _________________ Nawet jeżeli się to komuś nie podoba to w moich postach jest napisane tylko to co jest napisane, a nie to co się komuś wydaje, że jest napisane.
Bardzo ciekawy projekt. Również od dłuższego czasu główkuje nad wykonaniem lekkiego rotora AZ+EL do pracy dorywczej z balkonu lub statywu w terenie z lekką anteną VHF i wyżej. Elewacje planuje poruszać podobny serwem, dla azymutu chce zastosować nieco cięższe rozwiązanie niż samo serwo, ale z wykorzystaniem komponentów serwa tak aby od strony interfejsu kanał był nadal było tak samo widziany (i łatwy do sterowania).
Ten projekt jest przeznaczony do sterowania lekką anteną o małej powierzchni, wszystkie testy obecnie wykonuję na antenie 6el 70cm, ale docelowo mam zamiar wykonać lekką antenę 2m/70cm i będę testował mini-rotor z nią na balkonie pobierając dane z Orbitrona.
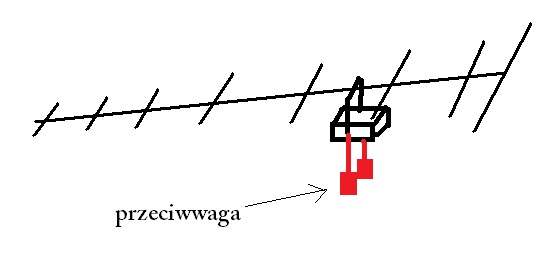
Uwaga z punktu widzenia mechaniki - na filmie widać że jest szansa na to że antena wzdłuż boomu jest wyważona statycznie (kiedy jest poziomo) - ale nie ma szans na wyważenie układu kiedy antena zacznie nabierać elewacji, bo wtedy zacznie bardzo obciążać napęd na osi poziomej (i łożyska na osi pionowej). Lekarstwo - dać odważniki po przeciwnej stronie osi poziomej niż antena. Jak na tym szybko namazanym rysunku:
Poza tym - ja bym chciał takie coś mieć na działkę! _________________ 73! Piotr SP5ULN
Witam, bazując na gotowych modułach (Arduino UNO, LCD 16x2, 2xSerwo mg995) buduję prototyp mini rotora. Wyświetlacz LCD 2x16 znaków, połączony jest z Arduino modułem LCM1602.
Dwa mini-serwa MG995 zasilane są z Arduino 3.3V, można je też zasilać większym napięciem z zewn. zasilacza.
Rotor może obracać anteny o masie do kilku kg.
Super! Widać, że Tobie się udało. Ja kombinowałem z tymi samymi servo i tym samym adapterem do tych Servo na Nano v3.0. Miałem problem z obsługą 360st - kupiłem przerobiony MG995 na kontynuowanie i wg zapewnień Sprzedawcy powinno to działać, ale próba obrotu serwa o dany kąt skutkowała tym, że servo działało jak silnik zwykły - tylko możliwośc ustawienia kierunku lewo/prawo i szybkości obrotu. Potem wziąłem silnik z HDD - myslałem, ze to jest silnik krokowy - okazało się, że to jest silnik bezszczotkowy.
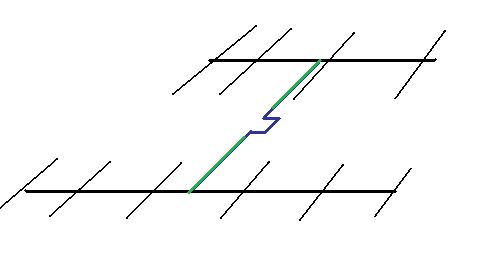
Mini rotor obraca się w obu płaszczyznach o 180 st. pomyślałem, że element poziomy (granatowy) będzie wykonany z aluminium (plus ew. wyważenie układu) a dalsze ramiona z tworzywa izolacyjnego (zielone), anteny będą obracały się w el. 0-180 st. co zapewni pokrycie całej sfery przy azymucie 0-180 st.
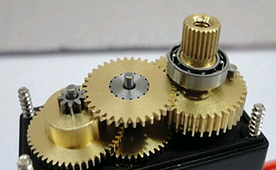
Podobno jest dostępna wersja 360 st. ale ja takiej nie mam:
Jurek to są serwa modelarskie. (...) Pozdrawiam Andrzej SQ5GVY
A czy chcesz iść w kierunku takim, że po próbach na serwach modelarskich, chcesz wykonać identycznie wykonane mocniejsze? Czyli tak, jakby w większej skali...?
Też o tym myślałem, jeśli ten "lekki model" się sprawdzi na balkonie czy w terenie to teoretycznie wystarczy tylko zmienić zasilacz na mocniejszy, dać mocniejsze serwa (nie wiem jakie, może: VSD-11AYMB, RB-150CS, GS-9257MG, FS5113R) i bardziej masywny poziomy element nośny. Oprogramowanie i elektronika pozostanie bez zmian.
Zastanawiam się też nad zastosowaniem modułu kompasu do elewacji i azymutu:
Serwa modelarskie mogą być naprawdę mocne. To nie tylko maleństwa do sterowania modelami samolotów do latania w parku. Najmocniejsze serwa można dostać w sklepach sprzedających części do budowy robotów. Tam też można znaleść takie o zwiększonym zakresie obrotu. No i uwaga na tzw windy czyli serwa które nie odpracowują położenia a jedynie prędkość i kierunek obrotu (o ni h pisze Paweł SQ7MRU).
a) Zastanawiam się jaka będzie trwałość konstrukcji i jak to wykonac aby rotor był przenośny, problem mam z wykonaniem belki nośnej (patrz rys. post powyżej 2015-01-04 19:52:53, kolor zielony i granatowy), która wg mnie powinna mieć 'wykorbienie' aby zmniejszyć nacisk boczny na serwo. Wykonałbym ją z profilu aluminiowego, ale to wykorbienie jest trudne do zrobienia - czy da się to jakoś sprytnie zrobić? Całość musi być rozkładana, i poza samym wykorbieniem belka nie powinna być metalowa (wpływ na anteny).
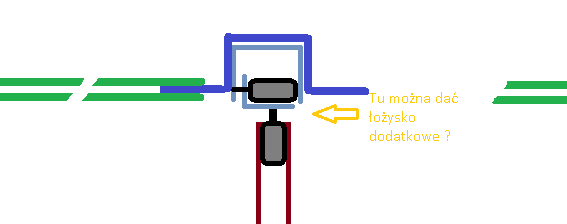
b) Czy może serwo azymutu umieścić dodatkowo w rurze, która by u góry na jakimś ślizgu wzmocniła konstrukcję? Co radzicie?
Wykonałem test odczytu danych z Orbitrona poprzez własny sterownik DDE, który wysyła na port COM dane z Orbitrona, Arduino je odczytuje bez problemu. Dodatkowo sprawdziłem KOMPAS elektroniczny HMC5883L, który podłączony do Arduino pozwala odczytywać azymut i elewację anteny. Pozostaje zrobienie mechaniki..
Wykonałem test odczytu danych z Orbitrona poprzez własny sterownik DDE, który wysyła na port COM dane z Orbitrona, Arduino je odczytuje bez problemu. Dodatkowo sprawdziłem KOMPAS elektroniczny HMC5883L, który podłączony do Arduino pozwala odczytywać azymut i elewację anteny. Pozostaje zrobienie mechaniki..
Super!. Pytania mam - czy podczas nadawania nie szaleje ten kompas ? - jak Servo jest 0-180st, to jak zaplanowałeś osbługę z orbitrona dla danych AZ 0-360st ? sterownik DDE czy sam rotor (Arduino) wie, że w AZ ma pracować na jakimś wycinku 180st z pełnego 360st (np. pracuj 90-270st AZ, gdzie do rotora idzie juz sygnał "skonwertowany", może idą dane AZ/EL normalne, ale sterujesz okienkoAZ osobnym parametrem do arduino ?
Pewnie zauważyłeś, że HMC5883L jest dość czuły na otoczenie (metalowe przedmioty czy pole magnetyczne od anteny) - no i druga wada - transmisja po l2C nie pozwala na dużą odległość czujnika od arduino. Poza tym same plusy _________________ Pozdrawiam Krzysiek SQ9SXT
1 - czy podczas nadawania nie szaleje ten kompas ? 2 - jak Servo jest 0-180st, to jak zaplanowałeś osbługę z orbitrona dla danych AZ 0-360st ? sterownik DDE czy sam rotor (Arduino) wie, że w AZ ma pracować na jakimś wycinku 180st z pełnego 360st (np. pracuj 90-270st AZ, gdzie do rotora idzie juz sygnał "skonwertowany", może idą dane AZ/EL normalne, ale sterujesz okienkoAZ osobnym parametrem do arduino ? 3 - Pewnie zauważyłeś, że HMC5883L jest dość czuły na otoczenie (metalowe przedmioty czy pole magnetyczne od anteny) - no i druga wada - transmisja po l2C nie pozwala na dużą odległość czujnika od arduino.
ad 1,3 tego nie sprawdzałem dokładnie, moduł jednak mnie pozytywnie zaskoczył tym, że poprawnie pokazuje kierunek i nie 'szaleje' spodziewam się, że jest odporny na pracę nadajnika a jeśli nie to mogę z PC wysyłać PTT do arduino lub dodatkowo filtrować 'szalone' wskazania w arduino
ad 2 do arduino idą dane z orbitrona, azymut 0-360 plus elewacja 0-90, oprogramowanie w arduino na początku robi kalibrację, określa min max kątów pracy rotora i zapamietuje środkowe pomiary z kompasu (el 90 zenit, azymut faktyczny środka zakresu pracy 0-180). Na tej podstawie wej azymut i elewacja są przeliczane do trybu pracy 0-180 0-180. Arduino wykrywa konieczność 'połozenia anten na plecy' aby pokryć zakres az>180. Znalazłem też serwo 360 st. (https://iprototype.nl/products/robotics/servo-motors/servo-360-metal-gear#) Trzeba by też poszukać możliwości zabudowania go w 'rurę z łozyskiem'.
ad 3 przeciwnie, moduł nie jest czuły na otoczenie, wystarczy odległość kilku cm od metalu i pracuje poprawnie, te moduły są w tel. kom. do obracania obrazu a nadajnik tel. gsm nie przeszkadza. Arduino będzie blisko rotora i blisko PC bo to zestaw przenośny (balkonowy). Te małe serwa nie nadają się do pracy na dachu. Potrzebne by były mocniejsze serwa zabudowane z łożyskami dodatk. i np. zasilanie solarne + aku 6V oraz bezprzewodowa transmisja USB do PC. Szukam wsparcia przy wykonaniu belki nośnej do anten (rys. kilka postów wyżej), jak to wykonać? _________________ 73! Tom
Tomek ponieważ serwa ustawiają się na zadanym kącie względem swojego zera elektrycznego to nie ma powodu żeby stale mierzyć azymut zestawu. Tak naprawdę to musisz "zorientować" zestaw przy inicjacji a potem można sobie mierzenie azymutu odpuścić. Myślę że i tak dokładność odpracowania kąta przez serwo jest większe niż dokładność tego kompasu. W profesjonalnych instalacjach bazujących na kompasach magnetycznych wykonuje się kalibrację sensora w celu eliminacji wpływu przedmiotów zakłócających pole magnetyczne. Dodatkowo powinno uwzględnić się deklinację magnetyczną, która np na terenie Polski wynosi około 5 stopni. Azymut położenia satelity podawany przez Orbitrona jest azymutem geograficznym więc na dzień dobry można sobie zafundować spory błąd śledzenia. Oczywiście przy krótkiej antenie o szerokiej charakterystyce to może nie mieć dużego znaczenia ale jeżeli łatwo można to wyeliminować to czemu nie.








 Trzeba by też poszukać możliwości zabudowania go w 'rurę z łozyskiem'.
Trzeba by też poszukać możliwości zabudowania go w 'rurę z łozyskiem'.