| CW PADDLE |
| Witam wszystkich. Trochę czasu minęło od mojej ostatniej wizyty. Trochę więcej pracy zawodowej i przeróbka z remontem warsztatu trochę mnie pochłonęły ale znów jestem i znów Was będę zamęczał moimi ustrojstwami Kolejny manipulator mojej produkcji to model o kwadratowej podstawie z mosiądzu, polerowany na połysk (na bogato) Wymiary podstawy 80 x 85 x 20 mm Waga nieco ponad 1200 gram i nóżki z twardego silikonu gwarantują wysoką stabilność. Dźwignie łożyskowane jak w każdym moim manipulatorze po dwa łożyska na dźwignię. W tym modelu łożyska są osadzone w podstawie , a nie jak we wcześniejszych konstrukcjach w dźwigniach. Naciąg niezależny prawej i lewej dźwigni na dwóch magnesach neodymowych. Wiosełka wycinane i polerowane z transparentnej pleksi. Rozstaw wiosełek po zewnętrznej 12-13 mm Z tyłu podstawy zamontowane gniazdo Jack na odpinany przewód połączeniowy z TRX-em. [img] 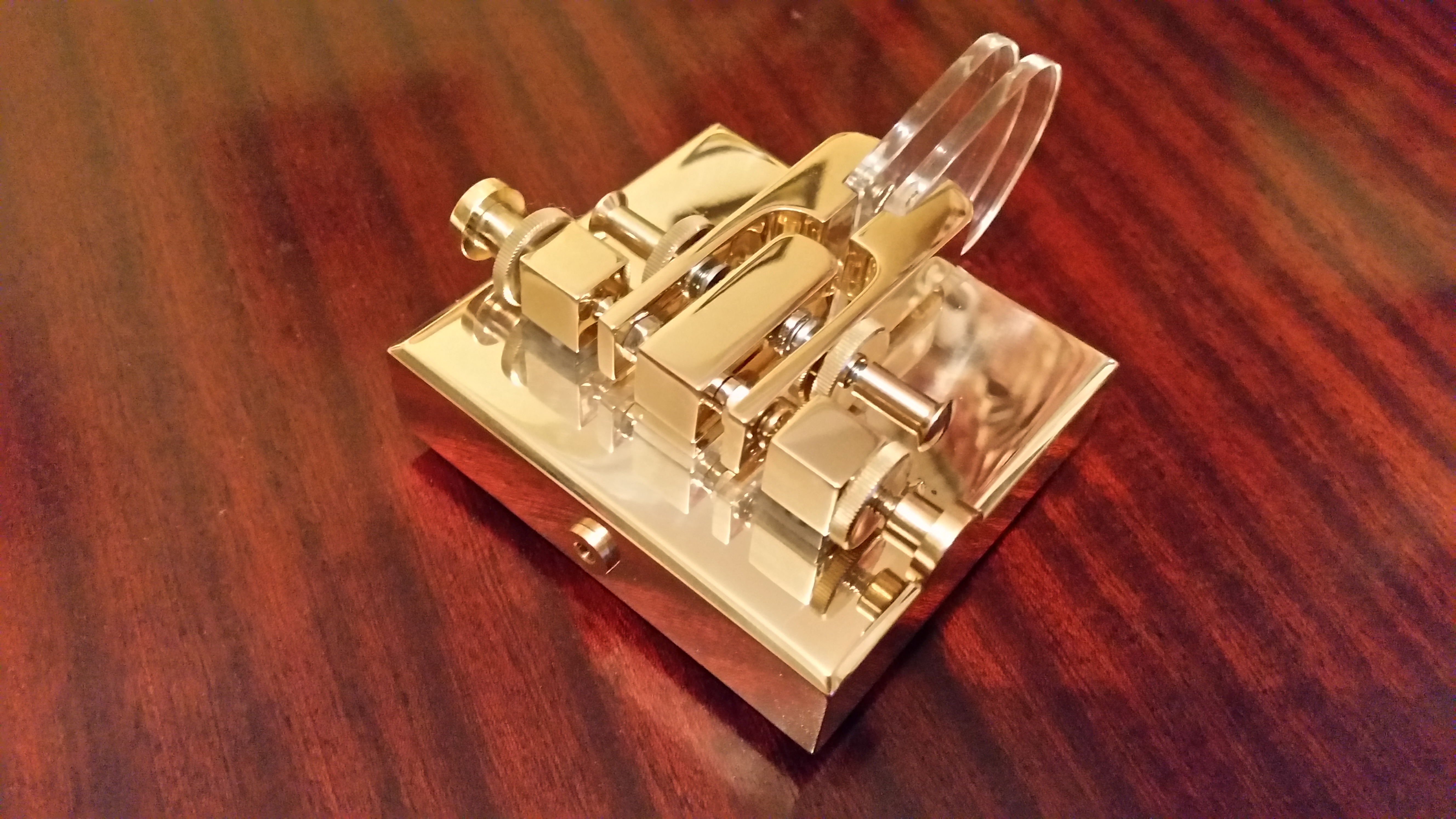   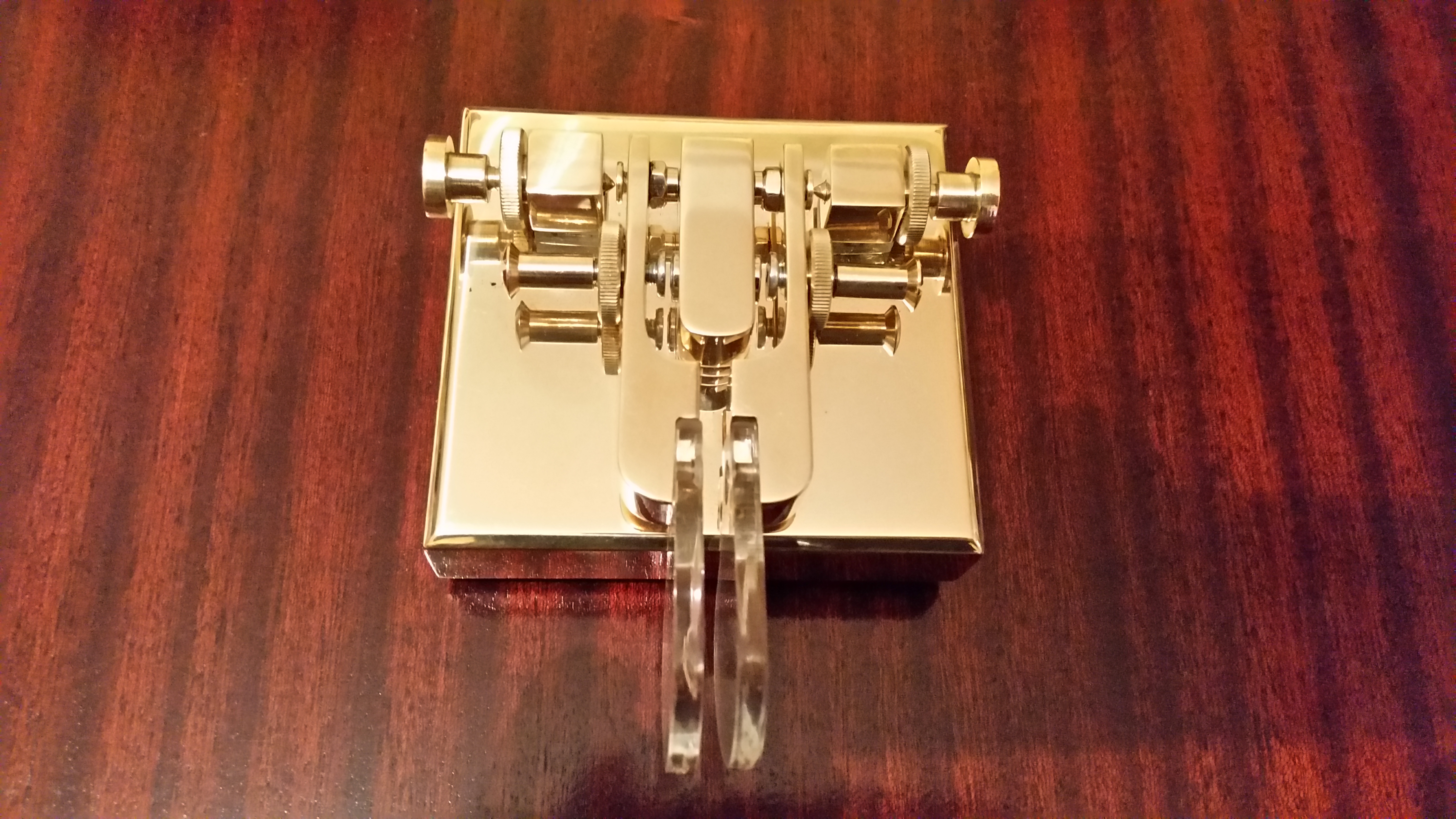   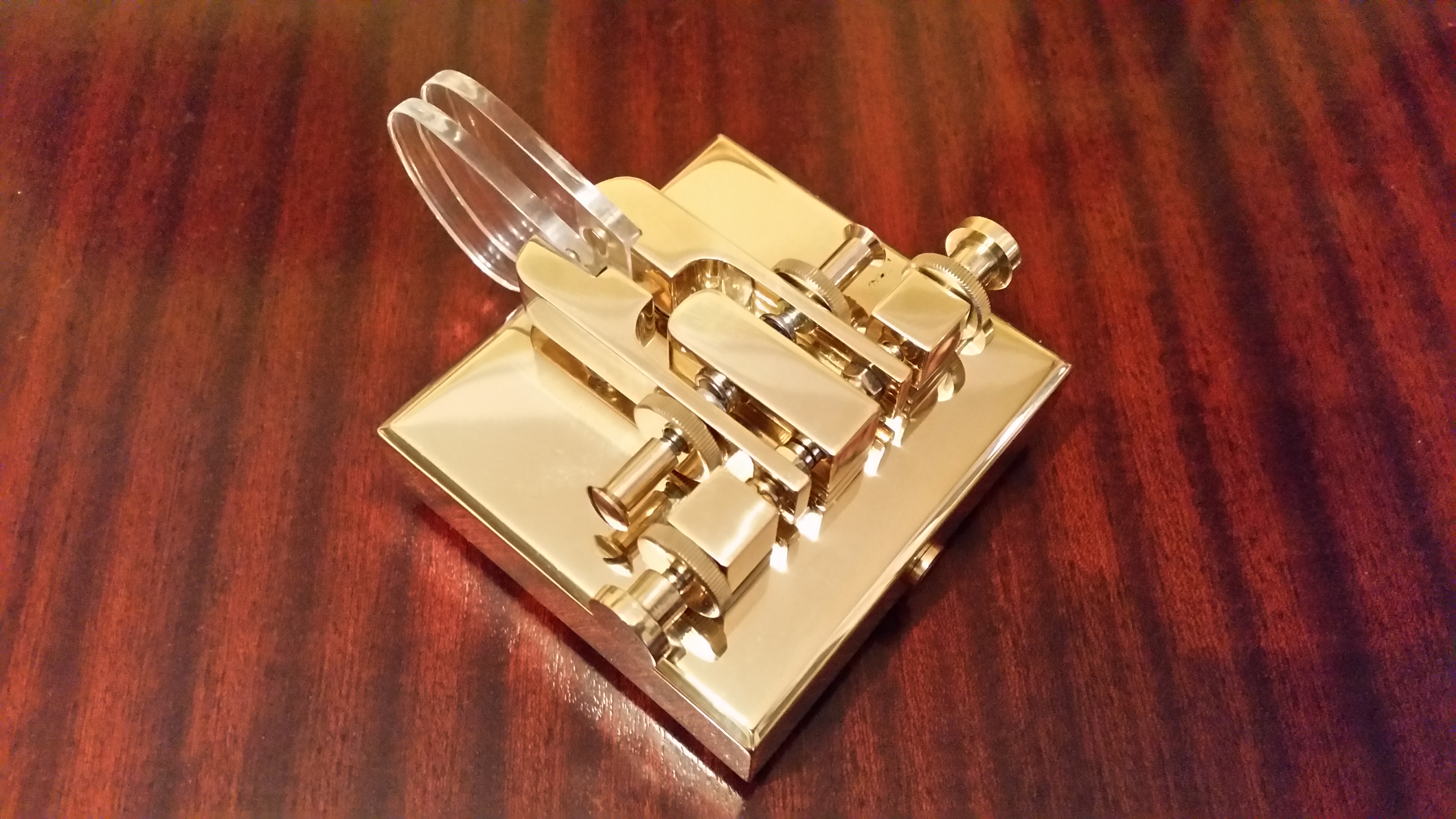   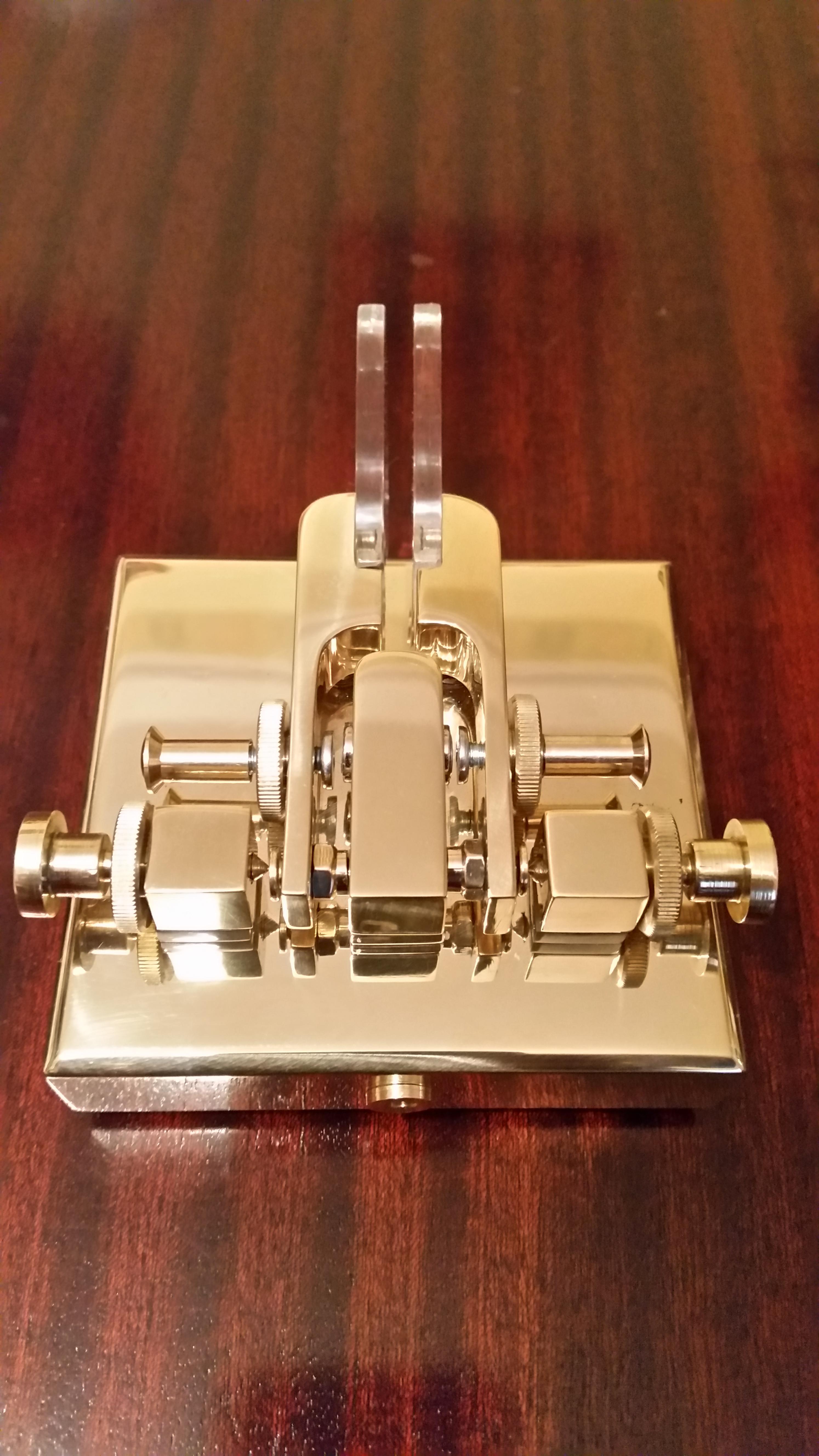 [/img] [/img] |
PRZEJDŹ NA FORUM