| Projekt MiniRotorNVX (Arduino Uno) |
| Andrzej, kod pisze na podstawie tego: http://arduikyo.blogspot.nl/2013/08/hmc5883l-compass-arduino-processing.html tam jest ten fragment z funkcją atan (dokładnie: atan2()) // Calculate heading when the magnetometer is level, then correct for signs of axis. float heading = atan2(scaled.YAxis, scaled.XAxis); Takie servo do elewacji z wyprowadzeniem osi po obu stronach?: Czy może takie: SR-518 Robot Servo 360 degree rotation 75g 17.3kg  Dzisiaj mam porozmawiać ze spawaczem aluminium aby mi wykonał ten element nośny z wykorbieniem. Profil 25x25 o grubości 2mm powinien być ok, zastąpi on ten U-płaskownik serva elewacji lub będzie na nim zamocowany. Dalsze elementy nośne anten chce wykonac z izolatora i będą to rury PCV nakładane na profil. Słabym pkt. konstrukcji jest zaznaczone żółtą strzałką miejsce - tu myśle co zrobic? Czy pospawać obudowe serva azymutu i dać podkładke slizgowa czy wpasować łożysko jakieś? Najszybciej złamie się w tym miejscu. Czekam na nowe serwo azymutu 360 st i wtedy nie trzeba będzie 'kłaść anten na plecy', trzeba by poszukać mocniejszych serw??? Mimo wszystko lekki prototyp wykonam, zobaczymy ile wytrzyma na balkonie lub działce (statyw). 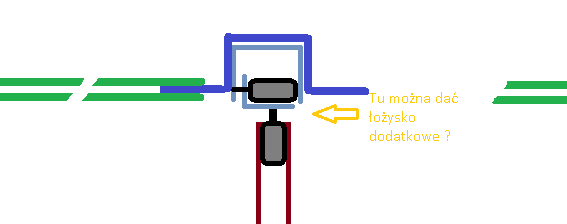 Co do błędów: Dokładność 1-2 stopnie przy małych antenach powinna wystarczyć. No chyba, że ktoś tam założy antenę na 10GHz wesoły Myślę, że większe błędy będą wynikać z wpływu otoczenia. to można MagMaster -em wykalibrować go dokładnie. |
PRZEJDŹ NA FORUM